

新闻列表News
滞环比较跟踪控制技术
本文发表于《中国电源博览》111期
摘要:介绍了PWM变换器的误差滞环比较跟踪控制技术的原理、参数关系、优缺点等,并给出了仿真的实验结果。
关键词:PWM变换器;滞环;跟踪控制
1 引言
滞环比较跟踪控制是一种非线性砰-砰控制方法,在各类闭环跟踪控制系统中广泛应用。PWM变换器的跟踪控制方法是PWM变换器的主要控制方法之一,其中滞环比较方法因其结构简单,响应速度快,参数鲁棒性好等优点,应用最为广泛。本文首先介绍了该方法的原理和基本波形;然后分析了其电路参数和系统特性之间的关系,指出了其主要优点和存在的问题;最后给出了仿真和实验波形。
2 基本原理
PWM变换器滞环比较跟踪控制方法原理示意图见图1。其中PWM变换器主电路以论文Ⅱ中的图1为例,采用输出电流跟踪方式。图1的各点波形示于图2中。 ir 为参考输入电流指令,if为输出负载电流反馈。

电流跟踪误差为
![]() (1)
(1)
2h为对称滞环比较器的滞环宽度,当e>h时,输出PWM=1,变换器输出电压uo=ud,负载电流io上升;当e<-h时,输出PWM=0,变+换器输出uo=-ud,负载电流io下降。依此反复,便实现了对输出负载电流io的跟踪控制,使其跟随指令电流ir,误差

![]() ;由于上下比较阈值相等,因此在每个开关周期之内,平均跟踪误差都为零。
;由于上下比较阈值相等,因此在每个开关周期之内,平均跟踪误差都为零。
显然,滞环比较跟踪控制只使用一个滞环比较器,非常简单;每个开关周期之内平均跟踪误差都为零,跟踪响应非常快;容易理解,由于跟踪控制是闭环控制,当直流母线电压Ud,负载参数R和L等电路参数发生变化时,不会影响跟踪的精度和稳定性,因此鲁棒性非常好。但是PWM变换器的开关周期Tc可能大范围波动。当开关频率![]() 过高时,PWM变换器的开关损耗增大,会使效率降低;当fc较低时输出谐波滤波器的体积增大,会使系统成本提高。这是滞环比较跟踪控制方法的主要缺点。
过高时,PWM变换器的开关损耗增大,会使效率降低;当fc较低时输出谐波滤波器的体积增大,会使系统成本提高。这是滞环比较跟踪控制方法的主要缺点。
在滞环比较跟踪控制的基本框架下(保持其优点),如何设法减小开关频率的波动范围,乃至使开关频率稳定不变(克服其缺点),一直是电力电子技术领域的科研人员的一个重要研究课题。
下面具体分析电流滞环比较跟踪控制方法中电路参数和系统性能之间的关系。
3 理论分析
以图1电路为例,只考虑负载由R和L组成的情况;当负载中包含反电动势时,分析方法相同,分析结果也类似。不过值得指出,当采用滞环比较跟踪控制方法时,总是要求负载具有一阶惯性特性。当输出电流跟踪时,一般都是RL负载;当输出电压跟踪控制时,一般都是RC负载。分析的数学过程和方法相同,结论也类似。
当PWM变换的输出为uo时,负载微分方程为
![]() (2)
(2)
当uo=Ud时,(2)式的解为
![]() ,或
,或
![]() (3)
(3)
同理,当uo=-Ud时,(2)式的解为
![]() ,或
,或
![]() (4)
(4)
上二式中,![]() 为负载惯性时间常数;
为负载惯性时间常数;![]() 为电流传输系数。
为电流传输系数。![]() 是反馈电流if的稳态最大值。
是反馈电流if的稳态最大值。
图2中if的所有上升段都是式(3)的一部分,所有下降段都是式(4)的一部分。现取图2中t1~t3之间的一个周期进行一般性分析,并重画于图3。

在滞环比较跟踪控制时,一般都可做如下两个假设,
假设1:![]() (5)
(5)
假设2: ir(t)的最高频率分量![]() 开关频率
开关频率![]() (6)
(6)
在t1时刻,按式(3)有(7)
可求得
![]() (8)
(8)
在t1~t2期间,根据假设1,式(3)可以用直线近似表示。对式(3)在t1点泰勒
展开并只取线性项,再将式(7)和(8)代入,得
![]()
 (9)
(9)
在t=t2点,![]() ,再考虑
,再考虑 ![]() ,代入上式,得
,代入上式,得
![]() (10)
(10)
根据假设2,可以在t1~t3期间对ir(t)线性近似,有
![]() (11)
(11)
代入式(10),得t1时刻附近的输出反馈电流上升段时间为 (12)
同理可得出任意时刻t附近的输出反馈电流下降段时间为
![]() (13)
(13)
式(12)和式(13)相加,得时刻t附近的开关周期Tc为
 (14)
(14)
或 (15)
(15)
当式(5)和(6)的条件强成立时,式(14)(15)的精度较高;反之当假设条件弱成立时,式(14)(15)的计算误差就会较大。
4 仿真研究
考虑电流指令ir(t)正弦信号,并可求得其导数为,
ir(t)=Irmsin2πfrt (16)
![]() (17)
(17)
将式(16)和(17)代入式(15),在MATLAB下用M函数可以求得一个指令周期内开关频率fc的取值,计算结果示于图4。图4中,取fr=60Hz,Irm=5A,h=±0.1A,
τ= 3.7ms。由图可见,在一个指令周期内,fc分别两次取得最大值和最小值;最大开关频率约为6.8kHz,平均开关频率约为4.35kHz,最低开关频率约为1.9 kHz。
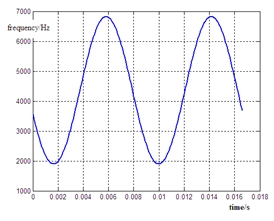
图4 式(15)的计算结果
根据本专题中所用单相桥式主电路模型,在MATLAB/Simulink平台中搭建仿真模型,对滞环比较方式进行仿真研究。图5为仿真结果,上图是实际电流信号与指令电流信号,中图是误差信号,下图是输出PWM信号。采用的仿真参数为:滞环宽度h=±0.1A,指令电流幅值A=5A,指令电流频率fr=60kHz,图5为滞环比较方式仿真波形图。
由上图可知,反馈信号能够快速跟踪指令信号,二者完全重合;由中图可知,误差限制在滞环±0.1A内,平均跟踪误差为零;由下图可知,PWM输出的平均开关频率为4.3kHz,最高开关频率为6.8kHz,最低开关频率约为1.9 kHz;但是,开关频率波动较大。
图5与图4比较,可知其取得最大与最小开关频率的位置,以及最大与最小平均开关频率的数值都是一致的。
5 实验结果
基于本专题论文Ⅱ中设计的主电路平台(反馈为电压信号)和所选参数(滞环环宽度h=±0.1A,指令电流幅值A=5A,指令电流频率fr=60Hz,Ud=100V),对滞环比较方式进行了实验研究。图6为滞环比较方式实验波形图,自上往下分别为指令电流信号,实际电流反馈信号(4A/格),跟踪误差信号(0.2A/格)。由图可知,实际反馈信号可快速跟踪指令信号,且平均跟踪误差几乎为零。但是,由于误差ADC采样周期约为4μs,存在系统延时;这个4μs延时,相当于滞环比较和定时比较相结合的跟踪控制方法中有一个4μs定时比较时间(论文IV);使得|e|>0.1A,且平均跟踪误差并不严格为零。总体上说,实验结果与理论分析和仿真

图5 滞环比较方式仿真波形图
结果是一致的。
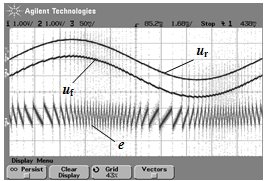
图6 滞环比较方式实验波形图
6 总结
PWM变换器的滞环比较跟踪控制方法具有电路简单、响应速度快、系统鲁棒性好等显著优点;不足是系统的开关频率波动较大。仿真研究和实验结果均证实了上述结论。